端到端自動駕駛引爆2024車企迎來生死競速
全球汽車行業正迎來一場前所未有的革命。預計到2024年底,全球智能汽車市場規模將突破1.5萬億美元,占新車銷量的50%以上。技術的飛速發展和消費者需求的迅猛增長,正在加速推動汽車行業的數字化與智能化深度融合。端到端自動駕駛技術成為行業的焦點,各大車企和科技巨頭紛紛投入巨資,爭奪未來出行的制高點。本篇文章將深入解析2024年全球汽車數智化的現狀、關鍵技術突破和未來趨勢,幫助您全面了解這一領域的最新動態,抓住行業機遇,洞察未來方向。
2024年,全球汽車行業正經歷著深刻的數智化變革。數字化和智能化技術的融合,全面重塑了汽車產業鏈,從生產制造到銷售服務,再到用戶體驗。傳統燃油汽車的市場占有率不斷下降,新能源車輛,尤其是電動汽車的比例持續上升。同時,智能駕駛、電動化和人工智能技術,已成為推動汽車行業進步的主要動力。
特斯拉作為全球智能駕駛領域的先鋒,其全自動駕駛(FSD)功能取得了重大突破,顯著提升了車輛的自動駕駛能力。在中國,蔚來、小鵬、百度Apollo、Momenta等新興車企和科技公司,通過技術創新和獨特的產品設計,贏得了大量消費者的青睞。這些廠商的積極布局,加速了汽車行業的數智化進程。
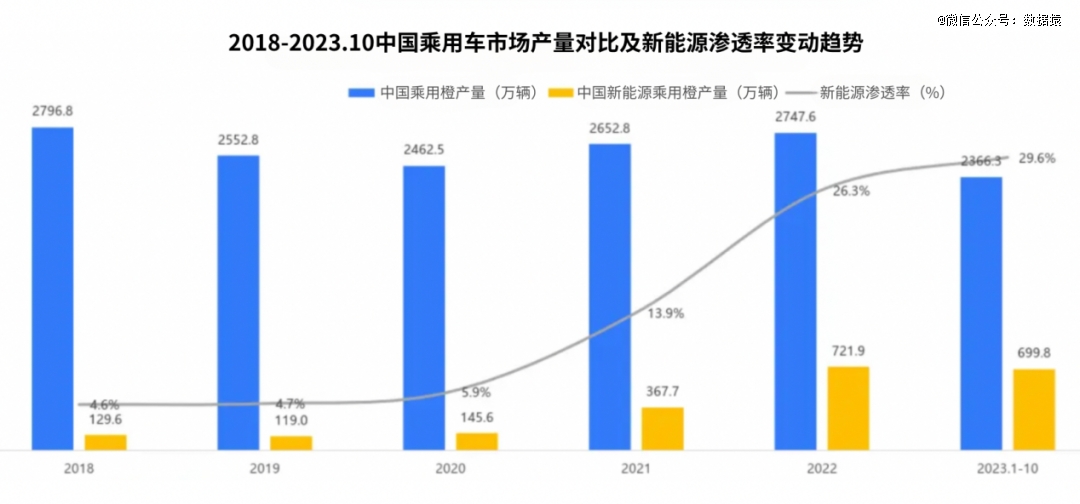
新能源汽車逐步替代了傳統燃油車,成為推動行業增長的主要力量。中國新能源汽車市場滲透率持續攀升,預示著未來新能源汽車將在全球汽車市場中占據更重要的地位。
消費者需求的變化是推動行業變革的關鍵。消費者對智能化和環保車型的需求顯著增長。智能駕駛輔助系統和電動車的環保優勢,已成為購車決策的重要考量因素。各大車企紛紛推出個性化車型,以滿足多元化的消費需求。
與此同時,各國政策的支持和規范對市場變化產生了深遠影響。多國出臺了支持新能源和智能汽車發展的政策,如購車補貼、稅收優惠和充電基礎設施建設等。數據安全與隱私保護法規的完善,也為車企的數智化發展提出了新的挑戰。這些變化促使汽車行業加速向更加智能化、環保化的方向轉型。
2024年,智能駕駛技術取得了突破性進展。端到端自動駕駛技術正成為智能駕駛領域的焦點。相比傳統的模塊化架構,端到端系統通過一個統一的深度學習模型,直接將傳感器輸入映射為車輛控制輸出,減少了中間環節,提升了系統的實時性和準確性。
這種技術的優勢在于更高的實時性和準確性,消除了各模塊之間的信息傳遞誤差,提高了響應速度。同時,端到端模型具備更強的泛化能力,能夠通過大規模數據訓練,適應復雜多變的道路環境。
各大企業紛紛投入端到端自動駕駛技術的研發。特斯拉全面轉向純視覺方案,推出了Tesla Vision,放棄了雷達傳感器,專注于端到端的視覺感知和決策。百度Apollo推出了基于純視覺感知的Apollo Lite端到端自動駕駛方案,降低了對高精度地圖和激光雷達的依賴。小鵬汽車的XNGP全場景智能輔助駕駛也基于端到端的深度學習模型,實現了從高速到城市道路的全場景覆蓋。
為深入了解車企對端到端自動駕駛的看法,我們采訪了行業*的自動駕駛公司Momenta。當被問及“您認為2024年最重要的汽車數智化技術是什么?為什么?”,Momenta的一位高管指出:“在2024年,端到端自動駕駛技術將成為最為關鍵的技術。當前的模塊化架構在信息傳遞和反應速度方面存在一定的限制,而端到端系統通過單一的深度學習模型直接將傳感器數據轉化為車輛控制指令,從而提升了系統的實時性和精確度。這種方法有效減少了信息丟失,實現了整體優化,更加精準地模擬人類駕駛行為,尤其是在復雜的城市交通環境中。”
打個比方,傳統的模塊化自動駕駛就像兩個侏儒合作駕駛,一人看路一人開車,信息傳遞中可能出現誤差和延遲。而端到端自動駕駛就像一個熟練的司機,直接觀察路況并做出駕駛決策,更加高效準確。”
由此可見,端到端自動駕駛被視為引領2024年汽車數智化發展的關鍵技術。相比傳統的模塊化架構,端到端系統在信息處理和決策效率上具有明顯優勢,能夠更好地應對復雜的城市交通環境。這一技術的突破,有望顯著提升自動駕駛的實用性和安全性,加速智能駕駛的普及。
數據來源自《2021-2027年中國自動駕駛市場全景調研與投資可行性報告》
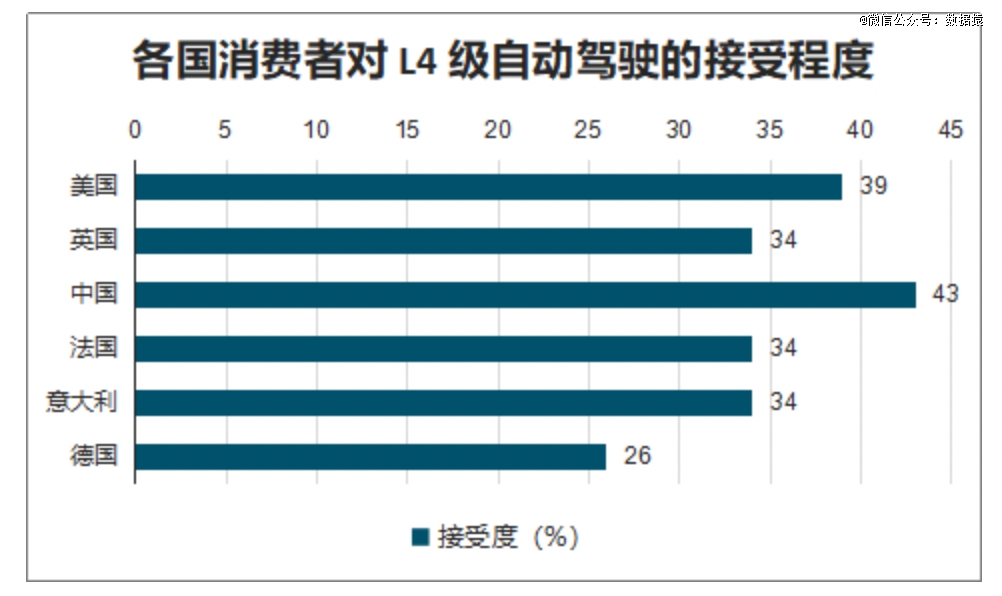
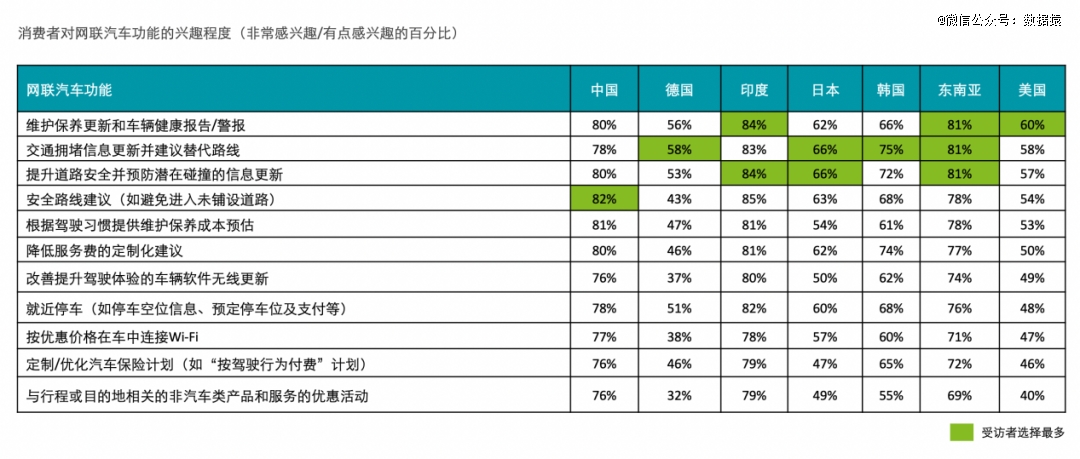
根據《2023年全球汽車消費者調查》,高端自動駕駛技術正逐漸贏得更多消費者的認可。在中國和美國,用戶對L4級別的自動駕駛表現出極大的興趣,這為端到端技術的廣泛推廣奠定了堅實的市場基礎。
端到端自動駕駛與車聯網(V2X)技術的融合,正在成為行業的新趨勢。V2X技術使車輛能夠與其他車輛、基礎設施以及行人設備進行實時通信,獲取更多環境信息,彌補傳感器的盲區和局限性。
這種融合增強了端到端模型的感知能力,V2X提供的環境信息可作為模型的輔助輸入,提升感知精度和決策安全性。各大廠商也在積極探索這一方向。百度Apollo與多地政府合作,推進車路協同的智能交通系統建設,將V2X信息融入端到端模型。小鵬汽車在部分車型上試點V2X功能,進一步增強端到端自動駕駛的環境感知。
一位行業專家也指出,“V2X的發展對于提升交通安全和效率具有關鍵作用。它直接影響著自動駕駛技術的落地,在未來智能城市中扮演著不可或缺的角色。”
人工智能在汽車領域的應用日益廣泛。車載語音助手、駕駛行為分析和個性化推薦等AI功能,提升了駕駛體驗。華為的問界7搭載了HarmonyOS智能座艙系統,實現了多終端的無縫聯動。滿足了消費者對車內AI交互的需求。未來,隨著端到端自動駕駛技術的成熟,汽車將成為真正的“智能移動空間”。
針對未來自動駕駛的發展趨勢,Momenta的CEO曹旭東在談及未來自動駕駛的發展趨勢時表示:“我們認為,城市高階智能駕駛在未來五年會呈現爆發式增長態勢。‘智駕摩爾定律’指出,軟件體驗每兩年提升十倍,硬件成本每兩年減半。預計到2025年底或2026年初,城市NOA的BOM成本可降至約5000元。軟件的提升沒有上限,未來自動駕駛將實現零事故。”
這一趨勢不僅將推動自動駕駛技術的普及,還將極大地提升城市交通的安全性和效率,進一步鞏固智能駕駛在汽車數智化發展中的核心地位。
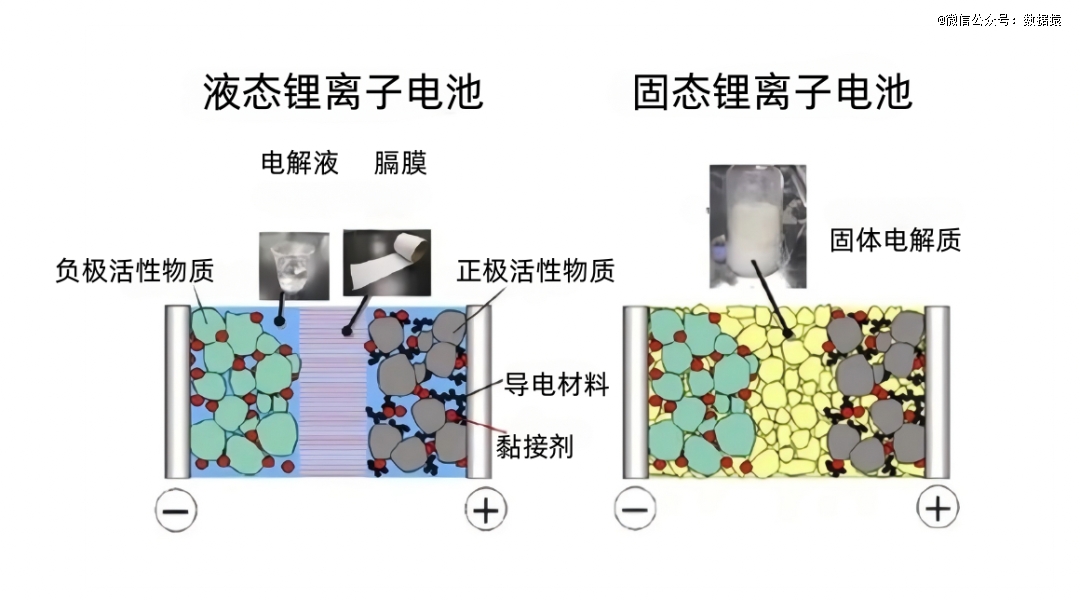
2024年,電池技術取得了重大突破。固態電池的研發進展,使電動汽車的續航里程和充電速度顯著提升。舉例來說,寧德時代發布了一款全新的超快速充電電池,能夠在10分鐘內為電動車充入80%的電量。與此同時,將電動汽車與可再生能源相結合,例如采用太陽能充電技術,正逐漸成為新的發展潮流。
然而,新能源汽車的發展也面臨著挑戰。我們采訪了一家*車企的產品經理,問到說“在新能源汽車領域,您認為*的挑戰是什么?如何應對這些挑戰?”
他指出說,“目前*的挑戰是充電基礎設施的完善和電池技術的突破。為此,我們與政府和相關企業合作,加速充電網絡的建設。同時,在電池技術研發上持續投入,提升電池的能量密度和充電效率,降低成本,以提供更好的產品給消費者。”
充電網絡的建設和電池技術的進步是推動新能源汽車持續發展的關鍵。通過與政府和企業的合作,車企正積極應對這些挑戰,確保新能源汽車市場的穩步增長。
各大車企逐步從傳統的汽車制造商轉型為“智能出行服務商”,通過端到端自動駕駛技術的應用,提供出行服務、數據服務等,拓展新的盈利模式。
特斯拉在端到端自動駕駛技術方面取得了顯著進展。通過持續的OTA升級,特斯拉不斷優化其FSD Beta版本的端到端自動駕駛模型。在復雜的城市道路和高速公路上,特斯拉的自動駕駛系統表現出色。這得益于特斯拉自研的Dojo超級計算機,為端到端模型的訓練提供了強大的算力支持。
此外,特斯拉在2024年進一步完善了純視覺感知的技術路線,放棄對雷達和激光雷達的依賴,專注于通過攝像頭和深度學習算法實現高精度的環境感知和決策。這一策略降低了硬件成本,提高了系統的可靠性。
Momenta基于數據驅動的“一個飛輪,兩條腿”戰略,以AI飛輪為核心,通過量產自動駕駛(Mpilot)和完全無人駕駛(MSD)兩條產品線,推進端到端自動駕駛的商業化。Momenta的代表表示說,“我們的所有產品都是為了推動數智化。從創立之初,我們就確立了‘一個飛輪,兩條腿’的戰略。‘一個飛輪’是數據驅動的AI飛輪;‘兩條腿’是指Mpilot量產自動駕駛方案和MSD完全無人駕駛方案。通過智能輔助駕駛和Robotaxi的雙重布局,我們創造了協同效應,量產自動駕駛帶來數據流,完全無人駕駛反饋技術流,持續為用戶刷新更好的使用體驗。”針對新能源汽車領域的*挑戰和應對策略,他說到,“可規模化的L4自動駕駛最關鍵的是安全,尤其是解決數百萬個長尾問題。我們開發了Momenta智駕大模型,將感知與規劃整合進一個大模型中,模仿人類的長期記憶,同時保留深度學習規劃模型,類似短期記憶,能快速學習。這大大提升了我們解決這些長尾問題的效率。”
在技術方面,Momenta開發了融合感知、預測和規劃的智駕大模型,將端到端深度學習應用于實際駕駛場景。他們的模型能夠模擬人類駕駛的長期記憶和短期反應,提高了對復雜交通狀況的處理能力。
Momenta與上汽集團、通用汽車、豐田等全球*車企深度合作,共同推進端到端技術的量產應用。他們的技術已在部分車型上實現了量產,提供高級別的自動駕駛輔助功能。
在新技術方面,Momenta推出了持續學習架構,通過大規模數據和自動化工具,實現模型的自我優化和快速迭代。這一架構能夠高效地解決自動駕駛中的長尾問題,提高系統的安全性和可靠性。
百度Apollo在端到端自動駕駛技術上取得了重要突破。推出了基于純視覺感知的Apollo Lite方案,降低了對高精度地圖和激光雷達的依賴。在硬件方面,百度自研的自動駕駛計算平臺“鴻鵠”,提供了每秒500 TOPS的強大算力,支持復雜的端到端模型運行。
在應用層面,百度Apollo的自動駕駛出租車(Robotaxi)服務——“蘿卜快跑”(Apollo Go)已在北京、上海、廣州、深圳等城市實現了規模化商業化運營。截至2023年10月,Apollo Go已累計提供超過200萬次的無人駕駛出行服務,成為全球*的自動駕駛出行服務商之一。
2024年,百度宣布了全新的端到端自動駕駛架構,整合了感知、預測和決策控制,提升了系統的實時性和可靠性。同時,Apollo加大了在大模型和自監督學習等前沿技術的投入,利用海量的真實道路數據,訓練更加智能的自動駕駛模型。
在商業化方面,“蘿卜快跑”的服務范圍不斷擴大,已在超過10個城市獲得了自動駕駛載人測試和示范運營的牌照。百度與多家汽車制造商合作,計劃在未來三年內投放數千輛自動駕駛出租車,全面推進自動駕駛出行服務的商業化落地。
百度還積極推進車路協同技術,與地方政府和企業合作,建設智能交通基礎設施。通過將V2X信息融入端到端模型,提升自動駕駛的安全性和效率。百度Apollo的一位高管表示,“我們在端到端自動駕駛技術上取得的突破,為自動駕駛商業化奠定了堅實基礎。‘蘿卜快跑’的成功運營,證明了我們的技術和服務模式在市場上的可行性和競爭力。”
蔚來推出了全新的NIO Adam超級計算平臺,搭載了四顆NVIDIA Orin芯片,總算力達到1016 TOPS,為端到端自動駕駛提供了充足的計算資源。配合Aquila超感系統,集成了33個高性能傳感器,包括高清攝像頭、激光雷達和毫米波雷達,提供了全面的環境感知能力。
蔚來通過持續的OTA升級,不斷優化端到端自動駕駛功能。其最新發布的NOP+(Navigate on Pilot Plus)功能,實現了在高速和城市道路上的自動導航駕駛。蔚來還引入了高級駕駛員監控系統(DMS),確保駕駛員的注意力,提高了行車安全。
小鵬汽車的XNGP全場景智能輔助駕駛是國內*面向量產的全場景高等級自動駕駛系統。基于端到端的深度學習模型,XNGP實現了在城市道路、高速公路、停車場等多種場景下的自動駕駛功能。
在技術創新方面,小鵬采用了BEV(Bird’s Eye View)感知架構,通過融合多傳感器數據,生成高精度的環境建模。這提高了系統在復雜城市環境中的感知和決策能力。
小鵬還自主研發了高速地圖數據閉環系統,通過眾包方式獲取高精度地圖數據,降低了地圖依賴,提升了自動駕駛功能的覆蓋范圍。
2024年,消費者對智能化和環保車型的需求持續增長。根據市場調查,超過50%的新車購買者希望車輛具備高級別的自動駕駛功能。智能駕駛輔助系統、車內AI交互和環保性能,已成為購車時的重要考慮因素。
一位行業分析師也提到,“消費者對智能汽車的接受度顯著提高。智能駕駛輔助功能、車內AI交互和環保性能,已成為他們購車時的重要考慮因素。市場反饋非常積極,越來越多的消費者愿意為這些智能化功能支付溢價。”
政府政策對汽車數智化的發展起到了重要推動作用。2024年,中國政府繼續實施新能源汽車購車補貼政策,鼓勵自動駕駛技術的研發和應用。多個城市開放了自動駕駛車輛的測試和示范運營區域。
一位行業專家指出,“政府政策在推動汽車數智化發展中起到了關鍵作用。政府提供的新能源汽車購車補貼和充電基礎設施投資,極大地促進了電動車市場的增長。此外,政策層面對智能駕駛技術的支持,也加速了自動駕駛技術的研發和應用。”
隨著智能汽車的普及,數據安全和用戶隱私成為關注焦點。各國紛紛出臺嚴格的數據保護法規,要求車企在提供智能服務的同時,確保用戶數據的安全。
Momenta的數據隱私和安全負責人強調:“我們在數據處理過程中,嚴格遵守相關法規,采用先進的加密和匿名化技術,保護用戶的數據安全。我們還建立了完善的用戶授權機制,確保用戶對數據的使用有完全的知情權和控制權。我們相信,只有在保護用戶隱私的前提下,才能實現智能服務的可持續發展。”
同時,政府也出臺了《數據安全法》和《個人信息保護法》等法規,明確了車企在數據處理中的責任和義務。這促使車企在提供智能服務的同時,必須確保用戶數據的安全和合規。
2024年,全球汽車行業正處于數智化變革的關鍵時期。端到端自動駕駛技術的快速發展,引領汽車行業邁向智能出行的新時代。各大廠商在技術研發、商業化應用和生態構建方面的突破,預示著全自動駕駛的時代即將到來。
未來,隨著端到端自動駕駛技術的不斷成熟,汽車行業將在多個層面迎來重大突破。在技術層面,端到端模型的泛化能力和安全性將進一步提升,實現全場景自動駕駛成為可能。在商業化應用方面,自動駕駛出租車、物流運輸等領域將率先實現大規模落地,為公眾提供更加便捷和高效的出行服務。同時,車企、科技公司和政府機構將共同構建智能出行生態,推動行業的可持續發展,形成協同創新、互利共贏的產業格局。